具身智能数据处理与模型训练框架
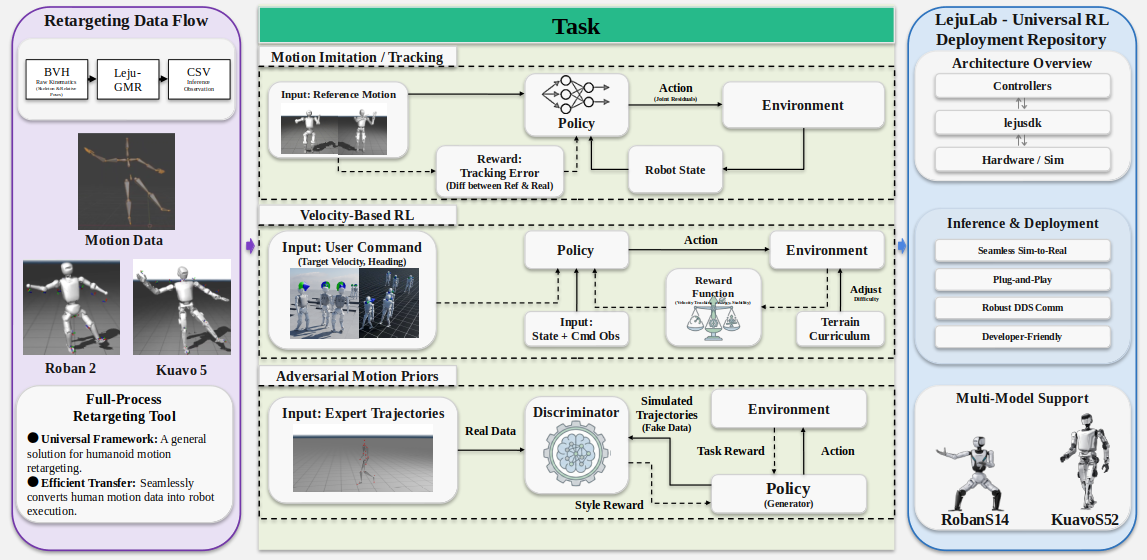
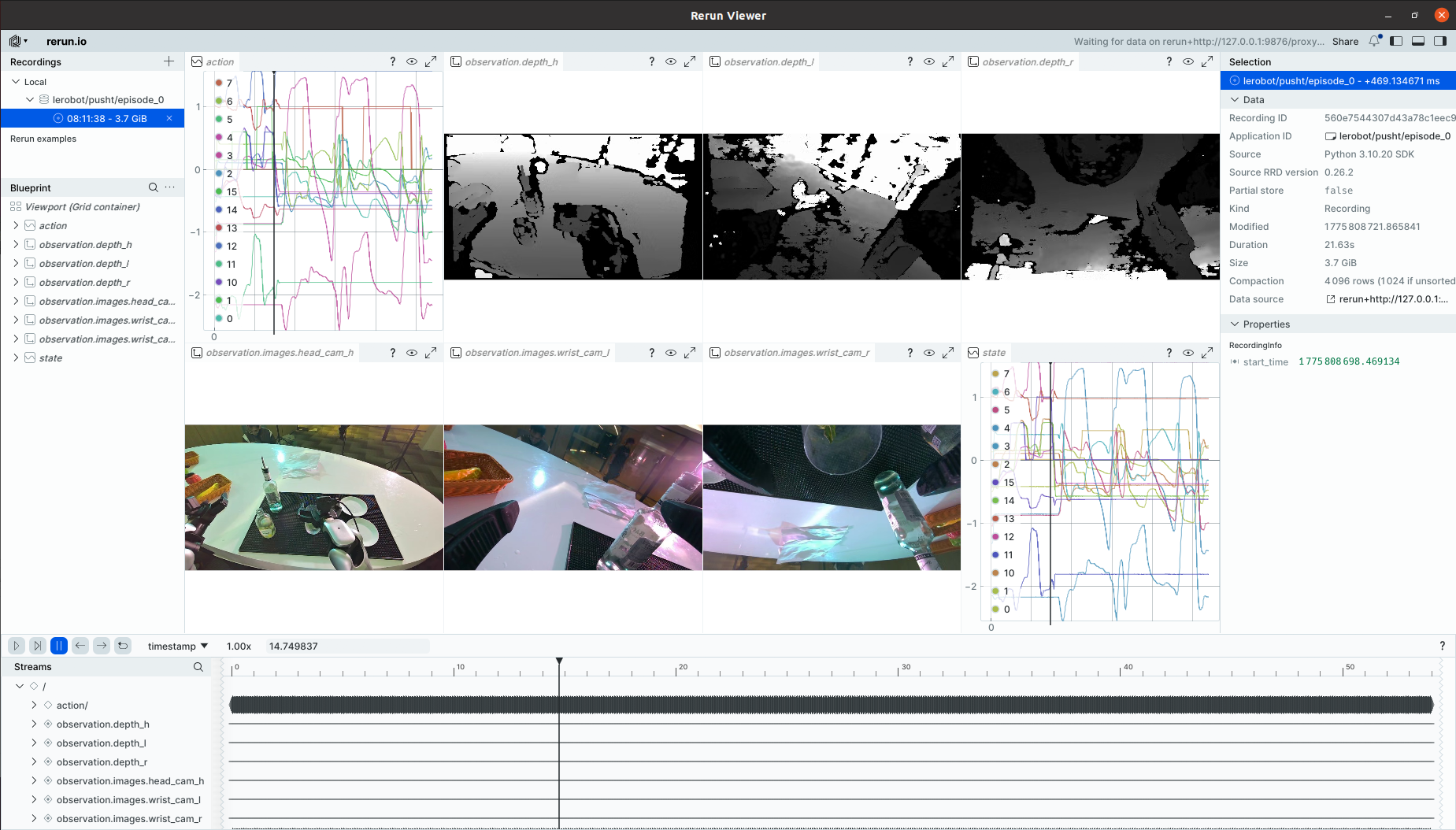
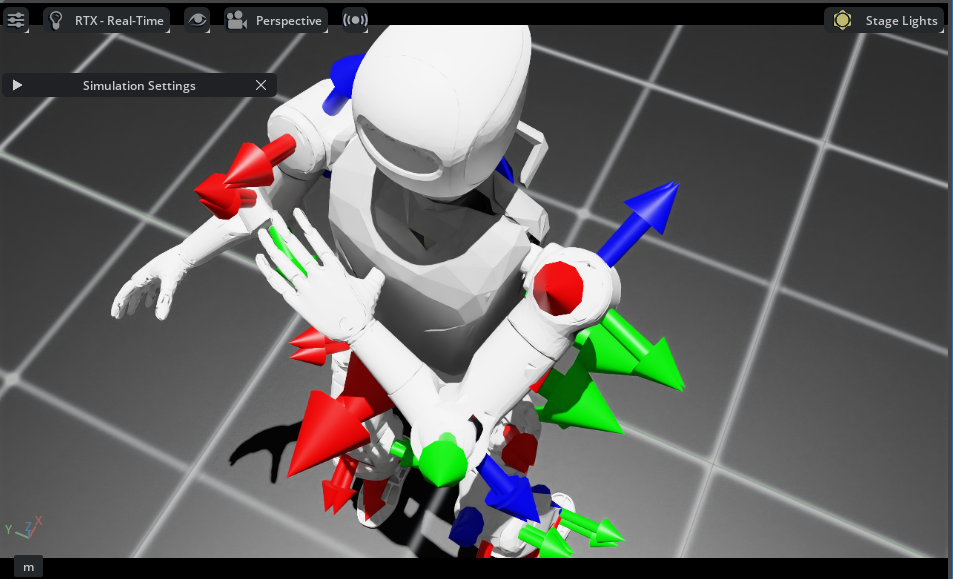
本文详细介绍了面向全尺寸人形机器人的具身智能数据处理与模型训练框架,基于 LeRobot 构建,完整覆盖从环境配置、数据采集、格式转换、模仿学习训练到真机部署推理的全流程。以乐聚 Kuavo 4pro、Kuavo 5/5W 机器人为硬件平台,搭配 VR 遥操作与乐聚数采平台完成真实场景数据采集,支持将 ROSbag 数据转换为标准训练格式,并通过 ACT、Diffusion 等策略进行端到端模仿学习训练。文中实现了两大典型科研场景:莫吉托酒调制(长程复杂任务拆解与序列执行能力)与果蔬分拣(目标识别、分类与泛化操作能力),并提供详细硬件清单、软件环境、部署参数及推理调优方案。整套框架可直接用于真机实验、复现演示与科研开发,为具身智能与机器人学习提供一站式工程化实践方案。


'%20fill-rule='evenodd'%20/%3e%3c/svg%3e)